Forgot Password?
Mobile number is now mandatory for the security of your account.
We've sent you a verification code on your mobile number. Please enter it here to set a new password.
We've sent you a verification code on your mobile number or email address. Please enter it here to set a new password.
(a) Discuss and explain the concept of singular points in non linear systems.
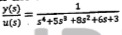
(b) if the transfer function of a certain systems is
. Find the matrix A and B.
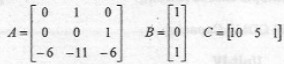
(a) Find the state transition matrix of
(b) Define state transition matrix. List the properties of state transition matrix.What are the methods to compute state transition matrix?
(a) Consider a discrete data system is described by difference equation.
y(k+2) + 5y(k+1) + 3y(k)= r(k+1) +2r (k)
Find state equation, matrix A and B.
(b) Describe about the root sensitivity of system with dead beat response.
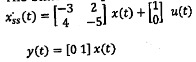
The state description of a servo process is given by the following equations.
A control law u=k x(t) +r is proposed, when r is constant reference input source. Find the steady state error to constant input r.
(a) Discuss and explain the basic concept of phase plane method.
(b) Write short note on behavior of non linear systems.
(a) Define linear and non linear systems. What are the common type of non linearities?
(b) Discuss the describing function method.
(a) Explain the lyapnov stability criterion.
(b) Explain Krasovkii method.
(a) Define state, state variable and state vector.
(b) State the relationship between the CCF and control liberty.
(c) Explain the terms saturation, black lash and dead zone in non linear system.
Write short note on:-
(a) Adaptive Control and applications
(b) Controllability and observability
Derive the pulse transfer function using z transform for linear discrete system with r(k) as input, c(k) as output and h(k) as impulse response.
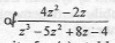
Find the inverse z-transform
Draw the typical phase portraits for (a) stable node (b) unstable node (c) stable focus (d) unstable focus (e) Centre or vertex point.
Draw the block diagram of model reference adaptive controller.
What is a limit cycle?
Discuss the Lipunov stability criteria.
Derive the state model of a linear system with multiple input and multiple output. Represent it in block diagram.
Derive the transfer function of state model and time domain solution of state equation. Give the properties of state transition matrix.
Explain the sampled-data control system (typical system with digital controller) with its block diagram.
Consider the system defined by:
Check the system for (a) Complete state controllability (b) Observability
Explain the sample and hold circuit. Write the relation between s and z domain.
Consider the characteristics polynomial F(z) = 2z4 +7z3 +10z2 +4z +1.Find the stability using Jury's stability test.
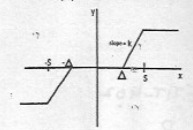
Drive the expression of the describing function for the sinusoidal response of non linearity with dead zone and saturation as shown in figure. Use this result to obtain the describing function for (i) saturation non linearity, i.e. (ii) dead zone non linearity i.e.
Explain how the linearization of a non-linear system is done. What are the techniques available for linearization?
Explain how the linearization Explain the method of stability analysis using describe function method.
Draw the block diagram of fuzzy logic control system and explain the function of each component.
Write a short note on self-tuning regulators.
Congratulations! Your trial of
is now active.
Let's catch up on a Zoom call and I'll help you craft a killer career plan! Bring your own coffee.
Sourabh Bajaj


 . Find the matrix A and B.
. Find the matrix A and B. 


 (ii) dead zone non linearity i.e.
(ii) dead zone non linearity i.e.